Let’s Make An Aquarium!
C++ Source: https://github.com/Michaelryang/Boids3D/
Boids is an artificial life program that was developed by Craig Reynolds in 1986. It is an example of emergent behavior, where complex behaviors come from relatively simple rules. I’ve always been a fan of emergent gameplay and behavior, which led to this particular investigation, among many others. In this post, I will briefly go over some of the things I worked on in this project.
The fundamentals of the boids algorithm
There are plenty of places where the algorithm is described, so instead of repeating this information, I suggest checking out this source, which also has a link to sample pseudocode. There are some differences in this implementation and mine, but the overall idea is there.
I began by implementing the core rules in Unreal Engine 5 with mainly C++. Below are the code snippets for separation, alignment, and cohesion headings:
FVector ABoid::CalculateSeparationHeading(TArray<TObjectPtr<ABoid>>& Neighbors)
{
FVector AveragePosition = FVector::Zero();
for (int x = 0; x < Neighbors.Num(); ++x)
{
AveragePosition += GetActorLocation() - Neighbors[x]->GetActorLocation();
}
return AveragePosition * BoidManager->SeparationFactor;
}
FVector ABoid::CalculateAlignmentHeading(TArray<TObjectPtr<ABoid>>& Neighbors)
{
FVector AverageVelocity = FVector::Zero();
for (int x = 0; x < Neighbors.Num(); ++x)
{
AverageVelocity += Neighbors[x]->Velocity;
}
if (Neighbors.Num() > 0)
{
AverageVelocity /= Neighbors.Num();
}
return (AverageVelocity - Velocity) * BoidManager->AlignFactor;
}
FVector ABoid::CalculateCohesionHeading(TArray<TObjectPtr<ABoid>>& Neighbors)
{
FVector AveragePosition = FVector::Zero();
for (int x = 0; x < Neighbors.Num(); ++x)
{
AveragePosition += Neighbors[x]->GetActorLocation();
}
if (Neighbors.Num() > 0)
{
AveragePosition /= Neighbors.Num();
return (AveragePosition - GetActorLocation()) * BoidManager->CohesionFactor;
}
return FVector::Zero();
}
Each returned heading is multiplied by a SeparationFactor, AlignFactor, and CohesionFactor respectively. This allows us to tune the weights according to our needs - for example, setting AlignFactor = 0.0 eliminates the behavior entirely, which is useful to create flocking behavior more reminiscent of swarming bugs. These forces are added to the boid’s velocity, and then clamped to a maximum/minimum speed. Additionally, we choose different radii for each behavior - generally, a lower separation radius and higher cohesion/alignment radius gives the smoothest and most realistic results.
Below are clips of the three rules displayed independently of each other, just for a quick visual of what is happening.
- Separation (boids move away from other boids that are too close):
- Alignment (boids move in the same direction as other boids):
- Cohesion (boids move towards the center/average location of the flock):
Obstacle Avoidance
With the basics implemented, the next step is obstacle avoidance. Essentially, each boid raycasts in the forward direction. If an obstacle is hit, then we continue raycasting in larger and larger angles from the boid’s forward direction until a clear path is found (or, if all raycasts were blocked, the furthest distance-to-obstacle found).
Before this is possible, we need a way to generate the directions we need to raycast, which are ideally spread out evenly over a sphere. This is problem known as “packing points on a sphere”. I found this stackoverflow post which described different methods to compute the points. I do not fully understand the math, but this is the code I used to generate my points:
void ABoidManager::ComputeAvoidanceRays()
{
float GoldenRatio = (1 + FMath::Sqrt(5.0)) / 2;
float AngleIncrement = PI * 2 * GoldenRatio;
for (int x = 0; x < NumAvoidancePoints; x++)
{
float t = (float)x / NumAvoidancePoints;
float inclination = FMath::Acos(1 - 2 * t);
float azimuth = AngleIncrement * x;
float X = FMath::Sin(inclination) * FMath::Cos(azimuth);
float Y = FMath::Sin(inclination) * FMath::Sin(azimuth);
float Z = FMath::Cos(inclination);
FRotator Rotator = FRotator(-90.0, 0, 0);
AvoidanceRays.Add(Rotator.RotateVector(FVector(X, Y, Z)));
}
}
The array of points also has the very useful property that it “spirals” out from the first point, which is perfect for our use case. We now have a set of directions in local space that we can use for obstacle avoidance. By also defining a maximum view angle, we achieve the following result:
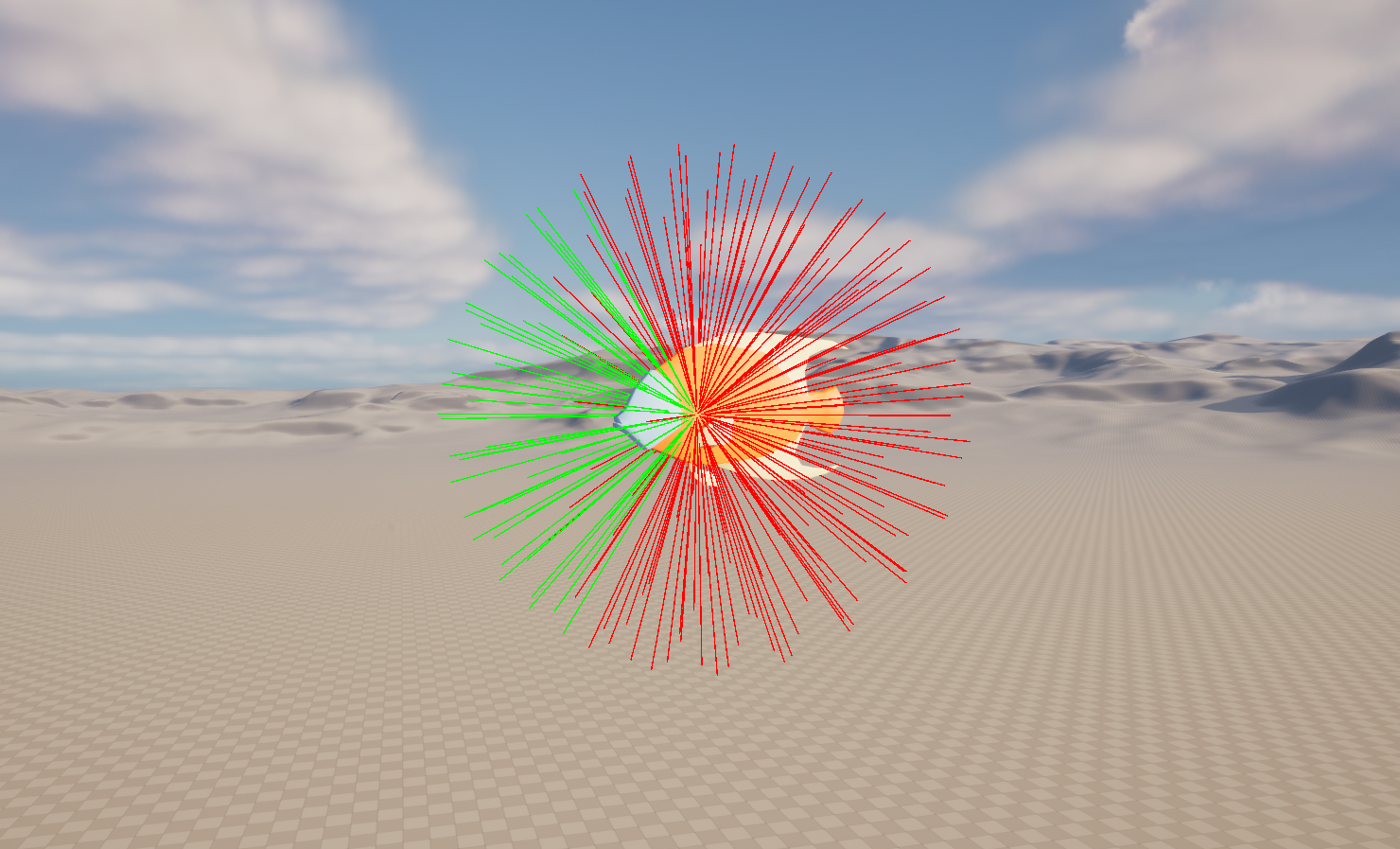
One important thing to note is that the rays are in local space to a point without any transforms. In order to be used by the boids, you must rotate the rays to match the boid’s rotation.
FVector ABoid::CalculateObstacleAvoidance()
{
TArray<FVector> Rays = BoidManager->GetAvoidanceRays();
FHitResult HitResult;
float FurthestUnobstructedDistance = 0.0f;
FVector BestDirection = GetActorForwardVector();
ETraceTypeQuery TraceChannel = UEngineTypes::ConvertToTraceType(ECollisionChannel::ECC_GameTraceChannel1);
EDrawDebugTrace::Type DebugTraceType = EDrawDebugTrace::Type::None;
TArray<AActor*> ActorsToIgnore;
for (int x = 0; x < Rays.Num(); ++x)
{
FVector WorldSpaceRay = GetTransform().GetRotation().RotateVector(Rays[x]);
float Angle = FMath::Acos(FVector::DotProduct(WorldSpaceRay, GetActorForwardVector()));
if (FMath::RadiansToDegrees(Angle) < BoidManager->ViewAngle)
{
bool TraceHit = UKismetSystemLibrary::SphereTraceSingle(GetWorld(), GetActorLocation(), GetActorLocation() + WorldSpaceRay * BoidManager->AvoidanceViewDistance,
50.0, TraceChannel, true, ActorsToIgnore, DebugTraceType, HitResult, true);
if (TraceHit)
{
if (HitResult.Distance > FurthestUnobstructedDistance)
{
BestDirection = WorldSpaceRay;
FurthestUnobstructedDistance = HitResult.Distance;
}
}
else
{
return WorldSpaceRay * BoidManager->MaxSpeed * BoidManager->ObstacleAvoidanceFactor;
}
}
}
return BestDirection * BoidManager->MaxSpeed * BoidManager->ObstacleAvoidanceFactor;
}
Two important things to note:
- This implementation exits as soon as a raycast doesn’t hit an obstacle. Because of this, the boids are “blind” to objects like walls if they are swimming parallel to them. If more “awareness” is required, you can set a minimum view angle that must be iterated through before exiting.
- The avoidance force does not scale with proximity. Typically, as you get closer to a brick wall, you are increasingly less willing to walk into it. For a stronger reaction to approaching obstacles, you may consider scaling the magnitude of the returned vector with proximity to an object.
A less important third thing is that I used a SphereCast instead of a raycast to deal with issue number 1. This is probably not as robust as making the changes mentioned above, However, by inspection, I think the boids are doing good enough for me!
September 25th Update - Marching Cubes
Since default cubes and a torus don’t serve as an interesting environment for our fish, I livened up the aquarium space with Marching Cubes. In contrast to a height map, Marching Cubes creates the mesh in a volume, potentially allowing caves and overhangs. This algorithm was created in 1987 and is fairly well known. This source provides plenty of visuals and a simple explanation of how the algorithm works. I didn’t venture into smoothing or accurately predicting cube edge locations for the vertices, since my main goal was not to create super-realistic terrain.
Using FMath::PerlinNoise3D to create a Voxel grid and then the marketplace Realtime Mesh Component to construct the mesh, I was able to generate structures like the following:
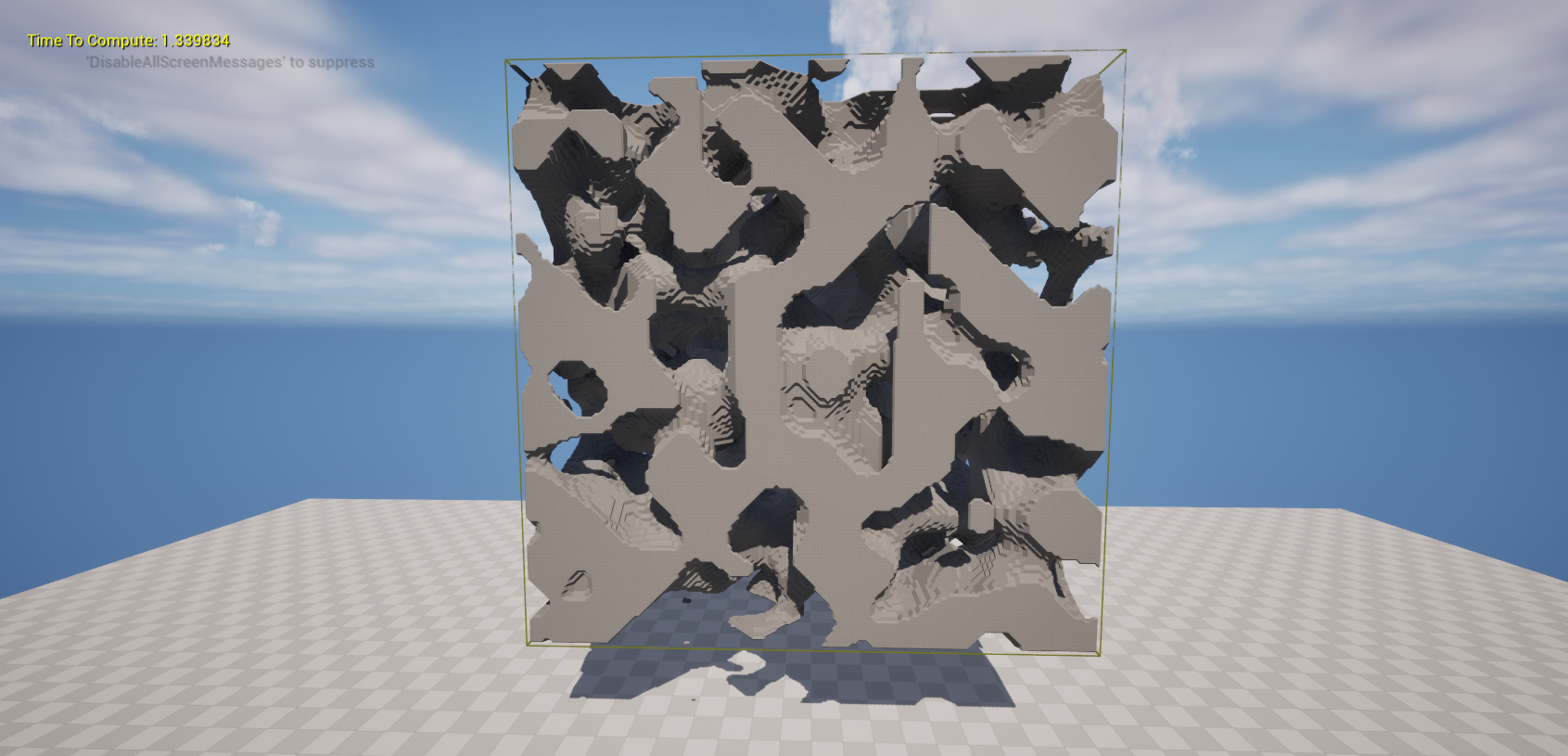
Adjusting the threshold for whether a voxel is considered “in” the terrain allows crude control over the density of the resulting mesh. Finally, by adding a Marching Cubes mesh into our aquarium and adding collision detection for raycasts, our boids now swim around between the gaps in our new terrain.
The issue where the mesh is not continuous at the edges can be resolved by simply returning a noise value of 0.0 at the outermost layer of voxels on each face. Below is the core of the code used to generate the mesh:
void UMarchingCubesComponent::ComputeVoxelGrid()
{
VGrid = FVoxelGrid(
int((MaxCornerWorldSpace.X - MinCornerWorldSpace.X) / CubeSize),
int((MaxCornerWorldSpace.Y - MinCornerWorldSpace.Y) / CubeSize),
int((MaxCornerWorldSpace.Z - MinCornerWorldSpace.Z) / CubeSize));
float NoiseSample;
for (float x = 0; x < VGrid.XResolution; ++x)
{
for (float y = 0; y < VGrid.YResolution; ++y)
{
for (float z = 0; z < VGrid.ZResolution; ++z)
{
FVector PositionWorldSpace = GetPositionFromIndices(x, y, z);
NoiseSample = FMath::PerlinNoise3D(PositionWorldSpace / Scale);
VGrid.Set((NoiseSample + 1.0) / 2.0, x, y, z);
}
}
}
}
void UMarchingCubesComponent::ComputeMarchingCubes()
{
TArray<TArray<FVector3f>> Triangles;
// compute triangles
for (float x = 0; x < VGrid.XResolution - 1; ++x)
{
for (float y = 0; y < VGrid.YResolution - 1; ++y)
{
for (float z = 0; z < VGrid.ZResolution - 1; ++z)
{
int TriangulationIndex = 0;
TArray<float> CubeData;
for (int i = 0; i < 8; ++i)
{
if (PointIsOnContinuousBoundary(CubePoints[i][0] + x, CubePoints[i][1] + y, CubePoints[i][2] + z))
{
CubeData.Add(0.0);
}
else
{
CubeData.Add(VGrid.Get(CubePoints[i][0] + x, CubePoints[i][1] + y, CubePoints[i][2] + z));
}
}
for (int i = 0; i < 8; ++i)
{
if (CubeData[i] > SurfaceLevelThreshold)
{
TriangulationIndex |= 1 << i;
}
}
int i = 0;
while (i < 16)
{
if (TriTable[TriangulationIndex][i] == -1)
{
break;
}
Triangles.Add(TArray<FVector3f>());
int TriangleEdgeIndices[3] = {
TriTable[TriangulationIndex][i],
TriTable[TriangulationIndex][i + 1],
TriTable[TriangulationIndex][i + 2] };
for (int j = 0; j < 3; ++j)
{
++i;
int IndexA = EdgeIndices[TriangleEdgeIndices[j]][0];
int IndexB = EdgeIndices[TriangleEdgeIndices[j]][1];
FVector3f VertexCubePosition = (CubePointVectors[IndexA] + CubePointVectors[IndexB]) / 2.0 * CubeSize;
FVector3f VertexLocalPosition = VertexCubePosition - ScaledBoxExtents + FVector3f(x,y,z) * CubeSize;
Triangles[Triangles.Num() - 1].Add(VertexLocalPosition);
}
}
}
}
}
// build the mesh
FRealtimeMeshStreamSet StreamSet;
TRealtimeMeshBuilderLocal<uint32, FPackedNormal, FVector2DHalf, 1> Builder(StreamSet);
Builder.EnableTangents();
Builder.EnableTexCoords();
Builder.EnableColors();
Builder.EnablePolyGroups();
for (int i = 0; i < Triangles.Num(); ++i)
{
FVector3f Edge1 = Triangles[i][0] - Triangles[i][1];
FVector3f Edge2 = Triangles[i][0] - Triangles[i][2];
FVector3f Normal = FVector3f::CrossProduct(Edge2, Edge1);
FVector3f Tangent = Edge2;
int32 V0 = Builder.AddVertex(Triangles[i][0])
.SetNormalAndTangent(Normal, Tangent)
.SetColor(FColor::Red)
.SetTexCoord(FVector2f(0.0f, 0.0f));
int32 V1 = Builder.AddVertex(Triangles[i][1])
.SetNormalAndTangent(Normal, Tangent)
.SetColor(FColor::Green)
.SetTexCoord(FVector2f(0.5f, 1.0f));
int32 V2 = Builder.AddVertex(Triangles[i][2])
.SetNormalAndTangent(Normal, Tangent)
.SetColor(FColor::Blue)
.SetTexCoord(FVector2f(1.0f, 0.0f));
Builder.AddTriangle(V0, V1, V2, 0);
}
const FRealtimeMeshSectionGroupKey GroupKey = FRealtimeMeshSectionGroupKey::Create(0, FName("TestTriangle"));
const FRealtimeMeshSectionKey PolyGroup0SectionKey = FRealtimeMeshSectionKey::CreateForPolyGroup(GroupKey, 0);
RealtimeMesh->CreateSectionGroup(GroupKey, StreamSet);
RealtimeMesh->UpdateSectionConfig(PolyGroup0SectionKey, FRealtimeMeshSectionConfig(ERealtimeMeshSectionDrawType::Static, 0), true);
}
Note that precomputing the voxel grid ensures much faster performance for this algorithm at the cost of a very large space requirement. For my purposes, the resolution of the mesh is not going to be humongous, so speed is king. If you are interested in a closer look at the whole source, you can find it here on my Github.
October 7th Update - Multithreading and Infinite Terrain Generation
At this point, I was interested in trying to make an infinite procedural world, but I was running into performance issues. For starters, I can’t render an infinite-sized mesh. Drawing inspiration from Minecraft, I first split the mesh into smaller chunks and only spawned/rendered chunks within a distance to the player. However, rendering 20 or so chunks in one frame in my test world would create a noticeable drop in framerate: This is because currently all calculations are done on the game thread. Using Unreal’s multithreading FRunnable class, chunks can be assigned to threads that will do all computation asynchronously, achieving smooth real-time performance. Multiple threads are managed by an AMarchingCubesWorld actor.
uint32 FWorldChunkThread::Run()
{
while (!bShutdown)
{
if (!bIsComputing) // thread waits until assigned a chunk to compute
{
FPlatformProcess::Sleep(0.01);
}
else
{
// this computation used to live in UMarchingCubesComponent
Triangles.Empty();
StreamSet = FRealtimeMeshStreamSet();
ThreadedComputeVoxelGrid();
ThreadedComputeTriangles();
ThreadedMakeStreamSet();
ThreadedMakeMesh();
// once finished, the chunk is added to a queue in AMarchingCubesWorld
// which will eventually assign a new chunk to this thread
MCWorld->AddToComputedChunkQueue(Coords, MarchingCubesComponent, ThreadIndex);
bIsComputing = false;
}
}
return 0;
}
The result can be seen here:
The terrain itself is very terrible and boring at the moment. The next step is to improve greatly upon the generation algorithm. So, until next time!
C++ Source: https://github.com/Michaelryang/Boids3D/